|
Currently, i am focusing on world models, 3D reconstruction, and 3D generation to build a closed-loop simulator for autonomous driving and embodied AI. I have a strong interest in technologies of autonomous driving and embodied artificial intelligence, and I am incredibly excited and passionate about the future realization of autonomous driving and embodied artificial intelligence. Since July 2021, I have been pursuing a five-year Ph.D. program at Nankai University, under the supervision of Professor Yongchun Fang. From 2017 to 2021, I spent an unforgettable time completing my undergraduate studies at Jilin University. Since April 2025, I have been working as an intern at DJI (Dajiang Innovation). Email / CV / Google Scholar / GitHub |

|
|
|
|
|
|
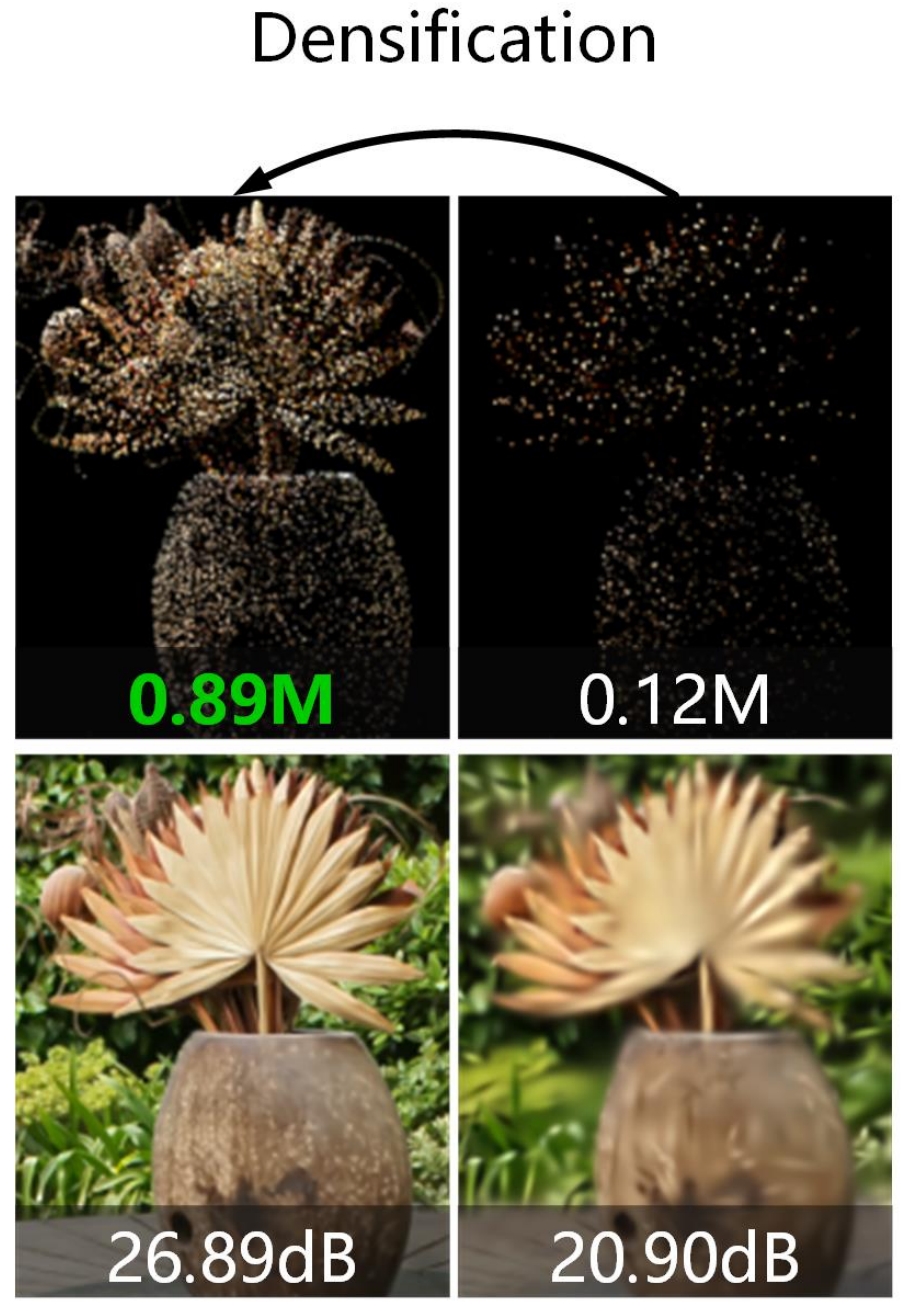
Shiwei Ren*, Tianci Wen*, Yongchun Fang†, Biao Lu arxiv / Project / code FastGS: Training 3D Gaussian Splatting in 100 Seconds Highly grateful for the hardly work of Shiwei Ren. |

|
Tianci Wen, Zhiang Liu, Biao Lu, Yongchun Fang* ICCV 2025 arxiv / Project / zhihu / code SEGS-SLAM: Structure-enhanced 3D Gaussian Splatting SLAM with Appearance Embedding Highly grateful for the kindly support from Zhiang Liu. |
|
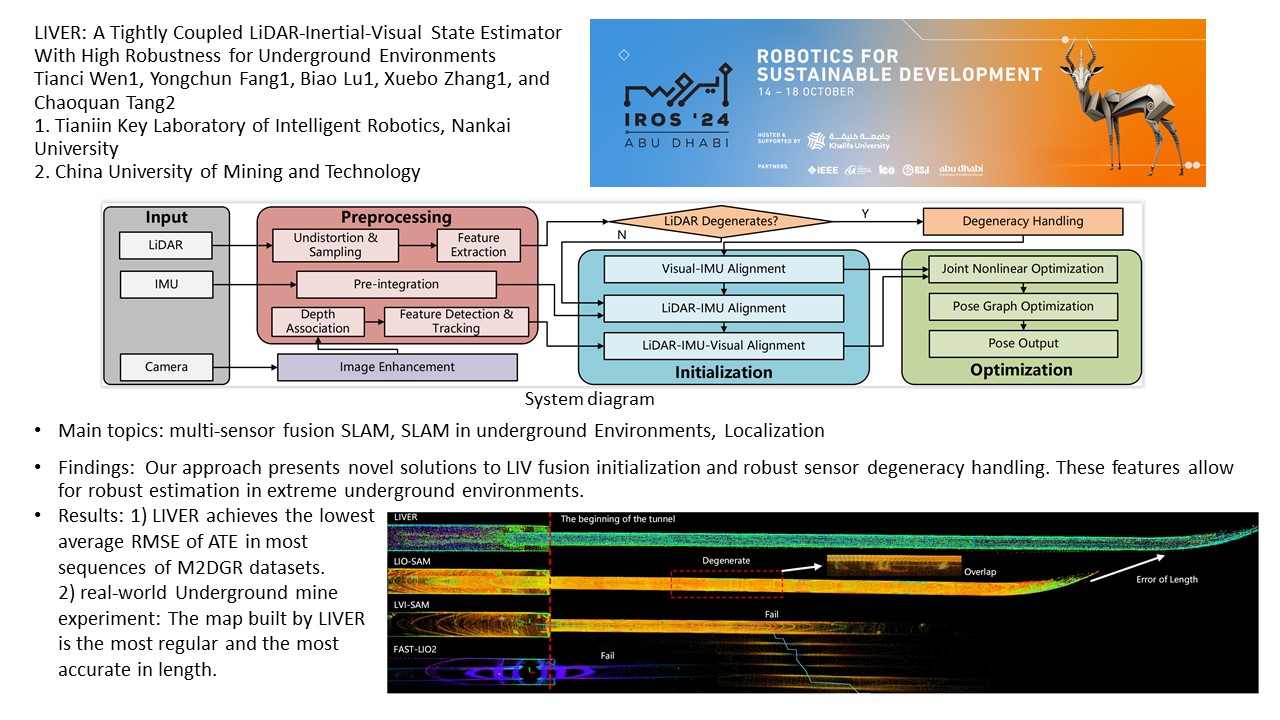
Tianci Wen, Yongchun Fang*, Biao Lu, Xuebo Zhang, Chaoquan Tang RA-L with IROS , 2024, oral video / poster Carefully coupled multi-senors lets the robot localization and mapping robustly in real-world underground mines. Highly grateful for the kindly support from Xuebo Zhang, Zhixing Song, and Chaoquan Tang. |
{kind=link}
|
|

|
Tianci Wen, Wei Huang, Yihan Chen, Yongchun Fang* Start from Dec. 2023 Discription: We simultaneously integrated a LiDAR, camera, and IMU into a space of approximately 10 cubic centimeters. Various gaits and speeds of the snake robot were tested, all achieving high-precision localization and mapping (with errors within 2 cm compared to motion capture). |

|
Tianci Wen, Biao Lu, Yongchun Fang* From the winter of 2021 to the summer of 2022 Discription: We implemented an indoor navigation framework for the wheeled-leg robot based on the ROS move_base framework and LiDAR-Inertial Odometry (LIO). |

|
Tianci Wen, Yihan Chen, Shiwei Ren, Yongchun Fang*, Biao Lu Since the end of 2023 We are currently working on the software and hardware development, as well as the implementation, of a SLAM system for a giant industrial crane. |
|
|
|
Zhixing Song: The guide in SLAM and research Haiming Gao: The guide in research direction |
|
|
|
|